L’enjeu de l’assemblage en orbite en Europe
Les différents projets spatiaux mis en place ou en cours de production en Europe ces dernières années nécessitent des capacités d’intervention robotique de plus en plus complexes en environnement contraint et parfois sans assistance humaine directe. C’est pourquoi l’assemblage en orbite représente l’un des grands défis des prochaines décennies dans le domaine du spatial.
Dans ce contexte, Magellium Artal Group est engagé sur plusieurs projets européens visant à simuler, planifier et superviser de futures opérations. Qu’il s’agisse de robotique embarquée ou d’assemblage en orbite, le groupe met à profit son expertise en applications robotiques et simulation 3D pour proposer des solutions concrètes.
L’assemblage en orbite, l’avenir de la robotique spatiale
Plusieurs projets du groupe structurent cette dynamique.
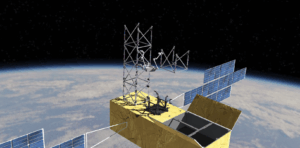
PULSAR constitue une référence. Ce projet européen H2020 , coordonné par Magellium Artal Group en partenariat avec GraalTech, CSEM, DLR, DFKI, Space Applications Services, ONERA et TAS-F, vise à développer les technologies nécessaires à l’assemblage de grands télescopes optiques directement en orbite. Le but est de permettre la manipulation autonome de composants de grande taille via des systèmes robotiques coordonnés. Magellium Artal Group y a développé un simulateur complet capable de représenter l’environnement spatial, les différentes opérations à effectuer et les interactions entre sous-systèmes.
Le projet ISAAC est lui un projet de l’ESA mené par Airbus Defence and Space UK (en collaboration avec Airbus Defence and Space France et Allemagne, Magellium Artal Group et l’Université de Cranfield). Il vise à démontrer les capacités d’assemblage autonome d’une structure : un robot est équipé de trois bras manipulateurs capables de se déplacer à la surface de la structure pour l’étendre. Le développement du projet comprend la conception des éléments constitutifs de la structure et la définition du ConOps (concept of Operations) pour les assembler, la planification des trajectoires du robot, la simulation des opérations pour validation et le développement d’une GCS (Ground Control Station) pour les opérations robotiques permettant de contrôler l’exécution.
Le projet EU-RISE, un projet européen Horizon Europe coordonné par Airbus Defence and Space Gmbh, réunit plusieurs partenaires européens (DFKI, Libre Space Foundation, The Exploration Company, Sener, Airbus Defence and Space Fra,ce et UK, Oiko+ et Magellium Artal Group) pour concevoir un écosystème complet pour la robotique d’assemblage et de maintenance autonome dans l’espace.
Enfin, le projet DEMARLUS vient pousser la technologie encore plus loin dans des situations complexes.
DEMARLUS, aller encore plus loin dans la robotique spatiale

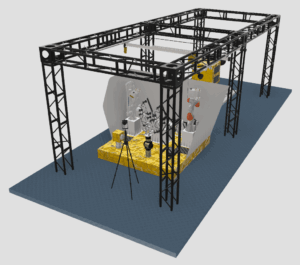
Le projet France 2030 DEMARLUS, mené avec The Exploration Company (TEC) avec Airbus Defence and Space France, propose un démonstrateur robotique au sol. Il reproduit les contraintes de la capsule « NYX » de TEC pour expérimenter un scénario d’assemblage robotisé en orbite via un jumeau numérique.
L’objectif du projet est de démontrer la faisabilité technique de l’assemblage autonome en orbite de structures complexes dans un environnement spatial.
Pour atteindre cet objectif, chaque partenaire du projet contribue à l’aide de son expertise. The Exploration Company apporte la plateforme orbitale et la logistique, Airbus Defence and Space met à disposition ses compétences en robotique embarquée et Magellium Artal Group assure la conception du jumeau numérique et de l’environnement de simulation permettant de planifier et superviser les opérations.
Le scénario de référence repose sur une « factory », une usine autonome, intégrée à la capsule Nyx, composée de plusieurs bras robotiques capables de réaliser des opérations d’assemblage et de manipulation diverses et variées. Depuis le sol, les opérateurs peuvent planifier les séquences, simuler les trajectoires et suivre l’avancement en temps réel grâce à une interface de supervision (GUI, replanification, logs).
Côté technique, le démonstrateur repose sur notre environnement de simulation GAIA, un framework pour le contrôle des bras robotiques, intégrant des outils de simulation et de cinématique 3D. Cette configuration du jumeau numérique permet, quant à lui, de tester les séquences, d’anticiper les collisions et d’ajuster les actions selon l’état du système ou les retours des capteurs.
L’ensemble du processus se déroule en deux temps : d’abord, des simulations complètes permettent de reproduire virtuellement le déroulement d’une mission réelle en orbite et d’évaluer les contraintes associées. Ensuite, ces scénarios sont rejoués en conditions quasi-réelles au sol, dans un environnement robotique physique synchronisé au jumeau numérique.
Cette démonstration a confirmé la capacité du système à réaliser des opérations d’assemblage spatial autonomes et robustes.
Vers la prochaine génération d’opérations robotiques en orbite
Les autres projets, dans lesquels nous sommes impliqués, visent à repousser les limites de la robotique spatiale. Chacun partage un même fil conducteur : intégrer dans une même chaîne la simulation, le contrôle, la perception et la supervision. Cette approche modulaire facilite le passage d’un projet à l’autre et accélère la réponse à de nouveaux besoins de robotique spatiale embarquée.
À travers ces projets, les jumeaux numériques et la simulation, nous mobilisons tout notre savoir-faire au service des futures missions orbitales.
Nos expertises nous placent en position de préparer dès aujourd’hui les futures opérations d’assemblage et de maintenance en orbite, tout en accompagnant la transition vers une plus grande autonomie des systèmes robotiques spatiaux.