Vision Artificielle
Depuis plus de 10 ans, nous nous proposons continuellement des technologies innovantes à nos clients en les accompagnant dans le développement et la transformation des innovations scientifiques en solutions opérationnelles.
Captation optimisée de données
Notre objectif : vous apporter des solutions de production de données efficaces et performantes
La rapidité de production de données précises, issues de capteurs divers, est essentielle à la chaîne de valeur que nos clients mettent en place. Nous concevons, développons, fabriquons et mettons en œuvre des systèmes d’acquisitions complexes permettant de répondre aux besoins spécifiques de nos clients. En nous appuyant sur l’expertise de nos docteurs et ingénieurs, nous apportons des solutions innovantes, au-delà de l’état de l’art, pour produire efficacement des données de qualité.
De la production de vidéos aériennes géoréférencées à la réalisation d’un banc de stéréovision, en passant par un système de perception LiDAR ou hyperspectral, nos équipes sauront répondre à l’ensemble de vos besoins.
Des technologies de pointe
Conception et réalisation
Nos expertises en matière de capteurs, d’optique, de mécanique et d’électronique nous permettent de concevoir et produire un système d’acquisition sur-mesure.
Produits logiciels
Nous développons des logiciels et concevons des systèmes d’acquisition de données composés de capteurs hétérogènes, synchronisés et géoréférencés.
Intégration de charges utiles
Accompagnés de partenaires reconnus dans leurs domaines, nous intégrons des charges utiles sur différents types de porteurs et validons leur fonctionnement pour une production optimale.
Mise en œuvre
Nous accompagnons nos clients dans les phases de production de données grâce à nos méthodes d’acquisitions ainsi que nos moyens aériens (drones à voilures tournantes et voilures fixes) et terrestres (plateformes mobiles).
Qualité de la donnée
Nous nous appuyons sur plus de 20 années d’expertise en matière de traitement de la donnée brute pour fournir une donnée fiable et utile. Nos systèmes produisent ainsi une donnée qualifiée.
Nos références dans ce domaine
Colibri pour le CNES
Acquisition drone et reconstruction d’images sur spécifications géométriques et radiométriques précises
RAPID EYEPERION (R&D)
Conception et fabrication de charges utiles large champ et 360°
MOBILEX (challenge ANR)
Equipement d’une plateforme robotique terrestre de capteurs visant à la doter de capacités de navigation autonome
Mobilité Autonome
Traitements LiDAR et fusion de données pour la navigation des véhicules autonomes
La captation de données en quelques images
Image et Vidéo
Le pixel valorisé pour une prise de décision rapide
Nos équipes développent des solutions matérielles et logicielles permettant d’analyser en temps réel les données image et vidéo. Initialement développées pour l’armée française, nos technologies bénéficient aux forces de sécurité civiles ainsi qu’à tout acteur devant intervenir de façon rapide et ciblée sur des zones géographiques étendues ou difficiles d’accès.
Une technologie qui répond efficacement à vos besoins
Traitement de l’image
Nous développons des algorithmes de valorisation de la donnée (par exemple, par amélioration de la qualité image, stabilisation logicielle, anonymisation, etc…)
Géoréférencement
Nos technologies sont construites sur l’expertise historique de Magellium Artal Group en géométrie des capteurs et géographie numérique et permettent un géoréférencement optimal de la donnée.
Détection
Détection de changement, de défaut, d’objet, de cible, de posture, nos solutions permettent d’extraire tout type d’information des images ou des vidéos. Nous nous appuyons pour cela sur une expertise avancée en traitement d’image et en intelligence artificielle.
Temps réel
Notre technologie offre une capacité d’exploitation en temps réel des flux vidéo, adaptée aux plateformes opérationnelles cibles.
Nos références dans ce domaine
Cartonuit
Système de cartographie drone temps réelle à empreinte logistique minimale pour le suivi en temps réel des grands feux de forêt
Lockeeper
Système de localisation basée vision pour la navigation du drone en environnement privé de GNSS
Road Mapper
Intelligence artificielle embarquée pour la cartographie en temps réel des éléments de mobilier urbain
C-Track
Traitement vidéo en temps réel pour le renseignement militaire aérien
Quelques images de nos outils
Robotique et Simulation 3D
De la simulation à la robotique en milieux contraints
Nos équipes développent depuis plus de 15 ans une expertise autour de la perception pour la robotique d’exploration planétaire. Ces travaux nous ont permis de contribuer à des missions de renom comme Rosalind Franklin Mission (ex EXOMARS), Rosetta ou encore MMX.
Nous mettons aujourd’hui nos compétences au service de toute application robotique critique nécessitant la prise en compte d’un environnement complexe ou hostile (robotique en orbite, navigation terrestre sans GNSS, …). Pour cela, nous déployons nos solutions de simulation robotique permettant la mise en place d’un jumeau numérique de votre système.
Un savoir-faire complet pour les missions de robotique autonome
Perception et localisation
Notre compétence dans le domaine de la fusion de données hétérogènes pour la localisation basée vision nous a permis de développer des solutions de localisation relatives et absolues performantes dédiées aux environnements complexes et sans dépendance aux signaux GNSS.
Cartographie 2D et 3D
Notre maîtrise des données 3D (LIDAR, Stéréovision) nous permet de proposer une représentation précise de l’environnement d’un robot, depuis la génération de Modèles Numériques de Terrain (MNT) en 2,5D à la représentation complète d’environnements 3D.
Traitement et détection 3D
Nous apportons nos compétences dans l’analyse sémantique de l’environnement au travers de composants de classification de terrain pour la navigation autonome et de détection, reconnaissance et suivi d’objets pour les environnements plus dynamiques.
Simulation et Jumeau Numérique
Nous développons une solution permettant de simuler un environnement robotique complexe afin d’assister l’utilisateur final dans le dimensionnement et la conception d’une mission robotique. Cet outil peut également être déployé en jumeau numérique afin de monitorer les opérations en cours.
Nos références dans ce domaine
ROSALIND FRANKLIN MISSION (ex-EXOMARS)
Développement et validation du démonstrateur technologique de navigation autonome sur Mars
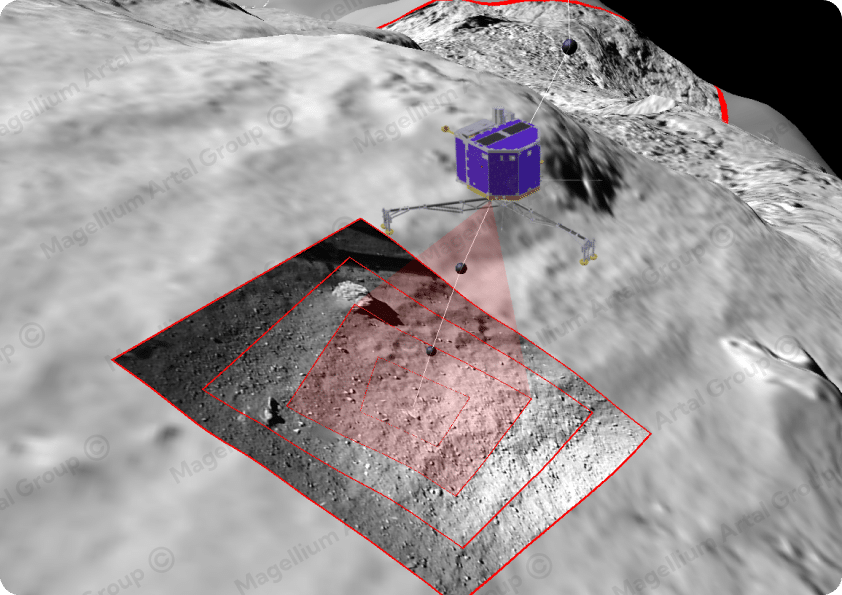
Rosetta
Localisation basée vision pour la reconstruction de la trajectoire de l’atterrisseur PHILAE
MMX
Perception et logiciel bord de navigation autonome pour l’exploration de Phobos
ADE/Corob-X
Perception et localisation pour les rovers autonomes d’exploration en conditions extrêmes
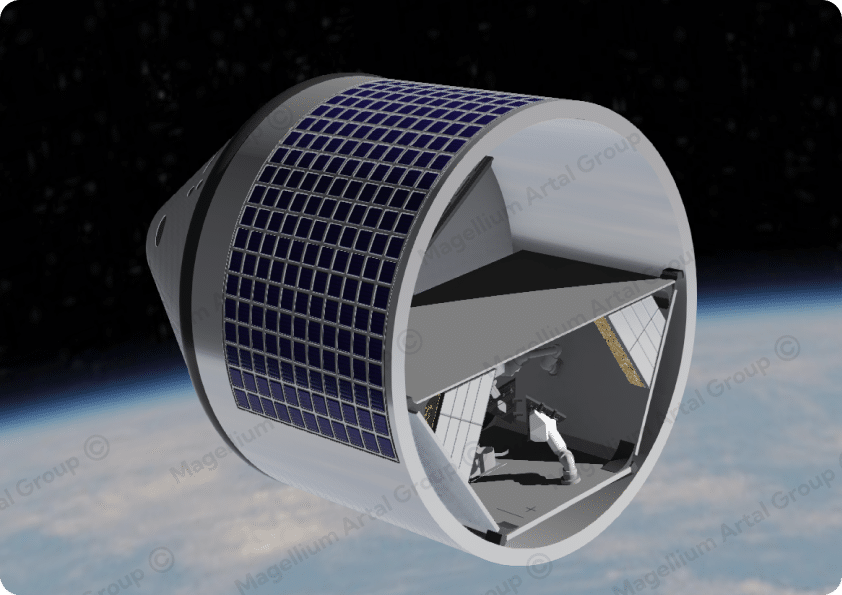
PULSAR, ISAAC, DEMARLUS, EU-RISE
Définition et la simulation 3D opérationnelle de missions d’assemblage autonome en orbite
Quelques images de la robotique
Surveillance de l'Espace
La détection et le suivi des objets spatiaux
Depuis 2015, nous développons une expertise et des solutions dans la surveillance de l’Espace sur la fonction de détection et suivi des objets spatiaux (satellites et débris), au sol ou embarquées à bord de satellites.
Un ensemble de solutions performantes
Algorithmes classiques
Développement sur mesure d’algorithmes de détection et de suivi, et patrimoine logiciel à l’état de l’art de ces fonctions
Intelligence Artificielle
Deep learning, ou apprentissage profond, en concurrence des méthodes classiques, avec des travaux sur le débruitage ou la détection
Des télescopes au sol aux charges utiles embarquées sur des satellites
Nous apportons nos compétences dans l’analyse sémantique de l’environnement au travers de composants de classification de terrain pour la navigation autonome et de détection, reconnaissance et suivi d’objets pour les environnements plus dynamiques.
Développement d’un simulateur
Simulateur de scènes spatiales optiques remarquable par sa représentativité et sa polyvalence, très précieux pour effectuer des travaux exploratoires, qualifier des solutions, entraîner les réseaux de neurones ou encore former les opérateurs
Nos références dans ce domaine
TAROT - CNES
Nous sommes responsables de la fonction de détection et de suivi des objets et débris spatiaux, opérationnelle depuis 2015 sur le réseau de télescope TAROT
EU SST
Développement en 2020-2021 du simulateur “haute-fidélité” et développement de nouvelles fonctions de détection et de suivi des objets spatiaux
CoS3 - CNES
Projet France 2030 opéré par le CNES. Cotraitant avec ArianeGroup et Eutelsat, nous développons la version embarquée dans l’Espace de cette fonction de détection et de suivi d’objets
Panoptès - Sodern
Sous-traitant de Sodern ArianeGroup, nous développement un outil de détection et suivi d’intrus/débris depuis l’espace avec une fonction embarquée pour un fonctionnement en temps réel.
Quelques images de surveillance de l'Espace
Vous êtes développeur(e) C++ ou Python ? Nous avons besoin de vous !
Nous sommes à la recherche de nos futurs collègues dans de nombreux domaines d’ingénierie spécialisée ! Explorez nos multiples offres d’emploi et commencez un nouveau chapitre dans votre carrière chez Magellium Artal Group.

Vous avez besoin d’une solution prête à l’emploi ou sur-mesure ?
Découvrez les autres expertises de Magellium Artal Group

Découvrez les nombreux secteurs d’activité dans lesquels nous intervenons
Du spatial à la défense, en passant par la sécurité, les transports, l’énergie ou encore l’environnement et le climat, nous sommes présents dans de nombreux secteurs d’activité. Trouvez-vous votre secteur ?
+150
clients nous font confiance
+10
secteurs d'activité différents
FAQ
Proposez-vous des solutions clé en main ?
Oui, nous offrons non seulement un ensemble complet de fonctions logicielles, mais également des solutions intégrées et packagées. Cela garantit une mise en œuvre aisée ainsi qu’une plateforme optimisée et adaptée aux algorithmes et aux conditions opérationnelles spécifiques.
Quel est votre positionnement dans le domaine de l'IA ?
Notre approche de l’intelligence artificielle chez Magellium est unique. Avec plus d’une décennie d’expertise, nous nous distinguons par notre vision pragmatique : au lieu de miser sur l’accumulation massive de données, nous priorisons le développement rapide de réseaux de neurones optimisés. Ces réseaux sont finement ajustés aux besoins opérationnels spécifiques, même en cas de volume de données limité.
Vos fonctions sont-elles intégrables dans un logiciel tiers ?
Absolument. Pour répondre aux besoins de certains clients sans complexifier les interfaces utilisateurs, nous offrons la possibilité d’intégrer notre suite fonctionnelle de manière transparente dans l’écosystème logiciel de nos clients.
Quelles sont les capacités de calcul nécessaires ?
Les besoins en capacités de calcul varient en fonction du nombre de fonctions à opérer simultanément. Nous proposons des solutions embarquées peu gourmandes en ressources, idéales pour une intégration au plus près du signal acquis tout en minimisant la consommation d’énergie. Pour les traitements en laboratoire, nous pouvons dimensionner les stations de travail de manière à éliminer toute limitation liée au nombre d’algorithmes ou à la fréquence d’échantillonnage.
Vous ne traitez que des données vidéo ?
Non, notre expertise s’étend bien au-delà de la vidéo. Nous sommes spécialisés dans l’analyse de données issues de capteurs variés, tels que Lidar, hyperspectral, IR, et d’autres. Nous géoréférençons ces données et les traitons en utilisant des technologies de pointe. Bien que la vidéo visible soit fréquemment utilisée dans nos systèmes, elle constitue seulement une parmi plusieurs sources de données que nous exploitons.
Vous avez une question ?
Nous vous répondrons aussi vite que met la donnée satellite pour atteindre l’opérateur.
