What is the MOBILEX Challenge?

The MOBILEX Challenge (MOBILité en environnement complEXe - mobility in a complex environment) aims to meet the challenge of autonomous vehicle navigation in unstructured, complex environments. Launched by Defense Innovation Agency (AID), in partnership with French National Research Agency (ANR), the Transportation Innovation Agency and the Center National d'Études Spatiales (CNES), this project is dedicated to the research and development of technological innovations. Deployed on a 3-year periodThis new challenge allows 7 pre-selected teams to take on challenges of increasing difficulty.
The MOBILEX Challenge aims to provide new technologies to enable robots to operate in hostile environments (natural and artificial obstacles, slopes, poor GNSS coverage, etc.) and under environmental constraints (heavy rain, smoke, strong winds, etc.). It aims to reduce the physical and mental strain on operators by enabling them to autonomously manage the trajectory of ground vehicles. Ultimately, the technologies developed will be useful in more operational projects such as advanced navigation capabilities, whether on-board vehicles or remotely via assisted teleoperation, applicable in both civilian and military fields, on Earth or in space.
Of the seven teams selected to tackle these challenges, Magellium Artal Group, in association with CEA-List, a laboratory specializing in intelligent digital systems, is participating through the REFLEX team for REactive Field Locomotion EXploration.
A robotic demonstrator is provided for each team. Controlled via an interface, the operator can steer the robot, monitor its status and manage its functionalities in real time. Teams have to come up with their own solutions and innovations to make the robot autonomous.
Teams face one challenge a year, and each year must present the results of the challenge and the technologies developed to a panel of judges.
Challenge 1: The REFLEX team's innovative approach inspired by space robotics
![]()
The use of historical expertise in space robotics
Challenge 1 consists of the initial design and implementation of the MOBILEX brick, in order to set up a reliable system that integrates open-source algorithmic bricks (and/or existing bricks within the consortium) and enables the main functionalities of the challenge to be ensured.
To meet this first challenge, our REFLEX team draws on Magellium Artal Group's long-standing expertise in space robotics, and more specifically in camera-based computer vision algorithms. Our team's approach is to transfer these technologies from space to terrestrial applications. Indeed, the problems and constraints encountered in this challenge are similar to those encountered for decades by planetary exploration missions such as PathFinder, Spirit, Curiosity and Perseverance, or the European Exomars project, to which Magellium Artal Group contributed the autonomous navigation software.
Stereo vision is the main perception modality for planetary exploration rovers. REFLEX's main advantage lies in the use of passive sensors, which offer numerous advantages over active LiDAR-type sensors.
While LiDARs generally have a greater range and better long-distance accuracy than stereo rigs, they behave like infrared beacons, making them ill-suited to certain operational military contexts requiring a specific level of discretion. What's more, they are not yet widely used in space robotics, notably because of their high power consumption and relative fragility.
Conversely, the use of stereo benches, consisting of two cameras, enables the robot to calculate, in a similar way to human vision, a high-frequency 3D representation of its immediate environment. As these sensors are passive, they have the advantage of being energy-efficient, not very fragile, relatively inexpensive and discreet. These characteristics make them particularly interesting for space and military applications.
In addition to the cameras, the REFLEX team has integrated various sensors: an inertial measurement system (to measure acceleration), a gyroscope (to measure orientation) and a Dual-GNSS RTK system (for precise absolute position and yaw angle).
This equipment, mounted on the robotic platform, enables the robot to understand its environment, locate precisely and navigate safely and efficiently.
Development of specific algorithms to meet the needs of the MOBILEX Challenge
The equipment added to the robot will enable it to generate a large amount of data about its environment. It will then process this data in order to model its environment, calculate the most optimal trajectory, and track this trajectory autonomously and in real time.
Several categories of algorithms have been designed by the REFLEX team to assist the robot:
- Perception to independently create a representation of its environment ;
- Localisation for precise position and orientation at all times;
- Navigation to enable the robot to move autonomously and safely in its environment;
- Supervision for error handling, calculation and data backup.
CEA-list contributes its expertise in the development of specific algorithms for trajectory calculation and tracking. The predictive controller has been developed by CEA and the trajectory tracking algorithm is currently the subject of a thesis.
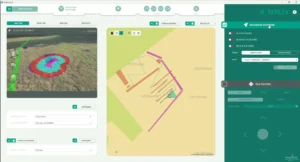
Reading this data is made possible by installing an HMI based on our LittleFox solution, the video player used by French special forces. Through this HMI, our team's goal is to provide operators with a clear, user-friendly, and comprehensive interface for controlling and supervising the robotic platform. Generating a video stream in STANAG4609 format, this NATO-standardized format allows a metadata stream to be associated with a video stream and provides information such as the robot's position, orientation, and speed. Finally, the robot is controlled using a joystick to select the speed of movement.
However, even if the aim is to make the robot autonomous, the operator retains control of it during autonomous navigation. A secure stop is available on the HMI, enabling the platform to be stopped remotely.
Challenge 2: A navigation brick that is gaining maturity and functionality
On December 19, 2025, in Paris, the organizers of the MOBILEX Challenge presented the results of the second challenge completed on October 16, 2025, for the REFLEX team at the DGA TT (Directorate General of Armaments – Land Techniques) site in Bourges. This challenge imposed particularly demanding specifications, including not only improvements to the code from challenge 1, but also the development of new features:
- Enhanced perception capabilities (detection of negative, transparent, and reflective obstacles, detection of slopes and inclines)
- Resistance to adverse weather conditions (rain, smoke)
- Resilience to sensor loss (simulation of failures)
During this second challenge, the REFLEX team was able to present its work and latest innovations. The vision-based perception system was able to correctly detect negative obstacles (ditches, holes) for which solutions relying solely on LiDAR had shown their limitations. Combined with the platform control developed by our partner CEA-List, this detection enabled the robot to easily pass the first tests of Challenge 2 and demonstrate the relevance of the choices made by the team.
During the first challenge, the REFLEX brick had already demonstrated its robustness in adverse weather conditions by performing autonomous navigation scenarios in heavy rain without any noticeable impact on perception. This was confirmed once again in the second challenge, where an artificial rain scenario was set up and the REFLEX team was one of the few teams to have crossed the affected area.
Significant development work has been carried out on the control interface to facilitate mission preparation and reduce the mental load on the operator. The information provided by the HMI is clear and allows the robot's decisions to be understood; the operator can therefore easily intervene to unblock the platform if necessary.
Despite GNSS signal instability encountered during the trials, the REFLEX team's localization brick, based on multi-sensor fusion, was able to take over. This ensured sufficient accuracy to continue the demonstrations and secure the robot's behavior throughout the scenarios.
The REFLEX team is now preparing for the next stage of the challenge by improving on what they have learned and tackling challenge 3, which will involve navigating tall grass, detecting puddles, and dealing with obstacles on slopes, among other things.
Autonomous mobility, a major innovation for many sectors
The MOBILEX Challenge is launched to revolutionise autonomous mobility technologies. This initiative aims to set tomorrow's standards with significant, long-term impacts in a wide range of sectors, from military to civil and scientific.
In the future, the technologies developed during the MOBILEX Challenge could be integrated into military operations to enhance safety and mission effectiveness in hostile terrain. Similarly, in the civilian sector, they could enable safer, more effective intervention during natural disasters, in disaster zones where ground conditions are often uncertain. Last but not least, these technologies could also be applied in the space sector, with applications such as lunar base construction, astronaut assistance or scientific exploration(cf. CNES Spaceship FR project).
The autonomy gained by the robot promises to optimize resources during interventions and guarantee uninterrupted operations, without fatigue or loss of vigilance.
The development of state-of-the-art solutions and the optimization of algorithms and sensors to maximise path completion speed will therefore be addressed in the following challenges.
Follow us on social networks to keep up to date with the progress of this project!
To download the communication kit: